



摘要:目的 針對給袋式包裝機(jī)稱量控制系統(tǒng)中由于物料與電磁振動(dòng)給料機(jī)的振動(dòng)存在一定非線性與時(shí)變性的缺點(diǎn),提出一種基于PLC的模糊PID稱量控制系統(tǒng)。方法 基于PLC的特點(diǎn)設(shè)計(jì)一種基于PLC的模糊PID控制方法,將稱量誤差與誤差變化率作為系統(tǒng)的輸入,采用西門子S7-200系列PLC對稱量系統(tǒng)模糊PID控制策略的實(shí)現(xiàn)進(jìn)行分析設(shè)計(jì),實(shí)現(xiàn)對PID 3個(gè)參數(shù)的實(shí)時(shí)改變;基于Matlab對控制系統(tǒng)進(jìn)行仿真分析,并通過聯(lián)機(jī)運(yùn)行以驗(yàn)證控制效果。結(jié)果 給袋式包裝機(jī)稱量系統(tǒng)的計(jì)量偏差不超過0.5%,且仿真結(jié)果表明模糊PID較傳統(tǒng)PID的控制效果更好。結(jié)論 基于PLC的包裝機(jī)稱量系統(tǒng)模糊PID控制系統(tǒng)實(shí)際控制穩(wěn)定,具有很強(qiáng)的魯棒性,提高了包裝機(jī)稱量過程的穩(wěn)定性和稱量精度,其精度控制為0.5%左右。
關(guān)鍵詞:PLC;給袋式包裝機(jī);控制系統(tǒng);模糊PID
可編程邏輯控制器(PLC)作為一種通用控制裝置,已經(jīng)廣泛應(yīng)用于各個(gè)領(lǐng)域,這其中就包括包裝機(jī)械。給袋式包裝機(jī)是一種全自動(dòng)的包裝生產(chǎn)裝置,其可以同時(shí)進(jìn)行多工位生產(chǎn)將稱量好的物料投放到包裝袋中,大大提高包裝速度。包裝行業(yè)普遍采用電磁振動(dòng)給料裝置實(shí)現(xiàn)物料的補(bǔ)給,但由于物料與給料機(jī)之間存在非線性與時(shí)變性的特點(diǎn),這使得包裝稱量精度存在一定的誤差。傳統(tǒng)的包裝機(jī)稱量系統(tǒng)的精度在±3%范圍內(nèi),如何在提高包裝速度的同時(shí)提高精度已成為行業(yè)研究的熱門之一。
給袋式包裝機(jī)根據(jù)系統(tǒng)設(shè)定質(zhì)量,實(shí)時(shí)對物料進(jìn)行稱量與修正,實(shí)現(xiàn)包裝機(jī)對物料的準(zhǔn)確控制。為了進(jìn)一步提高包裝機(jī)稱量系統(tǒng)的控制精度,采用以包裝物料為研究對象,將模糊控制與PID控制相結(jié)合,提出模糊PID控制。將PLC控制技術(shù)與模糊PID控制融合,利用PLC實(shí)現(xiàn)對包裝機(jī)稱量系統(tǒng)的模糊PID控制。這樣的控制方式既保留了PLC控制系統(tǒng)可靠性高、適應(yīng)性強(qiáng)的特點(diǎn)又加入了模糊PID對非線性系統(tǒng)具有良好控制效果的特點(diǎn),大大提高了控制系統(tǒng)的智能化,是當(dāng)今控制系統(tǒng)的發(fā)展趨勢。
1 包裝機(jī)稱量系統(tǒng)的模糊PID控制設(shè)計(jì)
國內(nèi)包裝機(jī)稱量系統(tǒng)普遍采用傳統(tǒng)PID控制,因?yàn)閭鹘y(tǒng)PID發(fā)展時(shí)間久,其理論基礎(chǔ)深厚,在普通控制中具有較好的控制效果,傳統(tǒng)PID控制結(jié)構(gòu)見圖1。傳統(tǒng)PID控制常出現(xiàn)在線性系統(tǒng)的控制中,它將輸入信號(hào)與輸出信號(hào)進(jìn)行比較得到控制偏差,對該偏差進(jìn)行比例、積分和微分共同運(yùn)算后輸出到控制對象中,使輸入輸出之間偏差縮小。S7-200PLC中通常利用PLC自帶的PID控制指令模塊來實(shí)現(xiàn)PID控制,由于PLC也是通過其CPU進(jìn)行數(shù)據(jù)處理,故只能處理數(shù)字量,這就要求將采集到的信號(hào)進(jìn)行模數(shù)轉(zhuǎn)化。
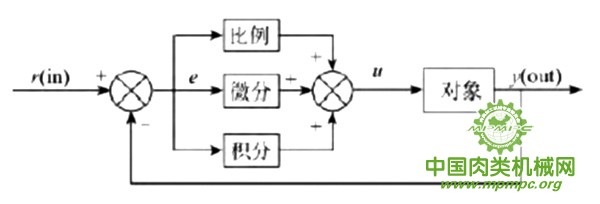
圖1 傳統(tǒng)PID控制結(jié)構(gòu)
模糊控制器工作基本原理是將輸入的數(shù)字信號(hào)經(jīng)過模糊化變成模糊量,送入含有模糊規(guī)則的模糊推理模塊,經(jīng)過近似的推理得出結(jié)論,然后被清晰化模塊變成清晰量,再輸出到下一級去調(diào)節(jié)被控對象,使其輸出滿意結(jié)果。
采用最基本的二維模糊控制結(jié)構(gòu),因?yàn)槠浣Y(jié)構(gòu)簡單、應(yīng)用廣泛,所以最具有代表性,適用于復(fù)雜系統(tǒng)。模糊自適應(yīng)PID控制器以e和ec作為輸入,其中e,ec分別為每次稱量的實(shí)際量與設(shè)定值的偏差以及偏差變化率,利用模糊控制規(guī)則在線對PID參數(shù)進(jìn)行修改,其結(jié)構(gòu)見圖2,利用PLC的PID指令可調(diào)用該指令執(zhí)行PID控制。
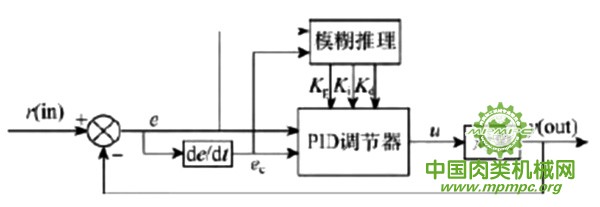
圖2 模糊自適應(yīng)PID控制器結(jié)構(gòu)
2 稱量控制系統(tǒng)的參數(shù)整定模糊PID控制算法
2.1 輸入、輸出量的模糊分布
為使實(shí)時(shí)輸入的變量清晰值都能夠得到合理的模糊化,需要確定覆蓋在模糊論域上的模糊子集數(shù)目,在確定各子集的模糊隸屬函數(shù)這個(gè)過程稱為進(jìn)行模糊分布。覆蓋模糊論域的模糊子集數(shù)目要適當(dāng),一般來說數(shù)目越多控制的精度相應(yīng)會(huì)更高,但是所需要的計(jì)算量卻大,造成響應(yīng)時(shí)間的延長。根據(jù)運(yùn)算性與經(jīng)驗(yàn)一般取數(shù)目為3~10個(gè),模糊子集的分布應(yīng)具備完備性、一致性與交互性。文中根據(jù)控制精度將輸入、輸出變量劃分為7個(gè)等級,系統(tǒng)設(shè)計(jì)誤差e的實(shí)際論域?yàn)閇?0.5g,0.5g],將其量化到模糊論域?yàn)閧?3, 3}中,其相應(yīng)子集意義為{B(負(fù)大),V(負(fù)中),S(負(fù)小),O(零),X(正?。?,Z(正中),D(正大)},輸出變量Kp,Ki,Kd 三者分別量化到論域?yàn)閧0,0.6},{0,0.12},{0,6}中,語言值同上。
一般模糊子集的隸屬函數(shù)應(yīng)該是連續(xù)函數(shù),Matlab 中提供5種不同類型的基本隸屬函數(shù),文中根據(jù)工程需要與經(jīng)驗(yàn)操作選取三角形隸屬函數(shù)。此外2個(gè)模糊子集的隸屬度函數(shù)發(fā)生交叉時(shí),交叉點(diǎn)處的隸屬度值應(yīng)選取合適,因?yàn)槿≈递^大,系統(tǒng)的穩(wěn)定性會(huì)有所提高,但會(huì)使得其靈敏度變差;反之會(huì)使系統(tǒng)不穩(wěn)定,模糊性變差。綜合考慮取0.2~0.7為宜,輸入、輸出量的隸屬度函數(shù)見圖3。
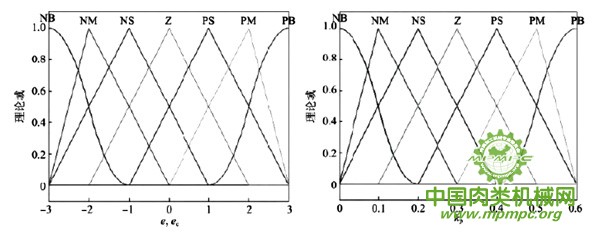
圖3 輸入、輸出量隸屬度函數(shù)
2.2 模糊控制規(guī)則的建立
模糊PID控制是找出PID 3個(gè)參數(shù)與e和ec之間的模糊關(guān)系,在運(yùn)行中通過不斷地檢測偏差和偏差變化率,根據(jù)控制原理對3個(gè)參數(shù)進(jìn)行在線修改,以滿足不同情況下對控制的不同要求,從而使被控對象具有良好的動(dòng)靜態(tài)性能。
根據(jù)參數(shù)對系統(tǒng)輸出特性的影響情況,可歸納出系統(tǒng)在被控過程中對于不同的偏差e和偏差變化率ec,偏差e的論域?yàn)閧B,V,S,O,X,Z,D},偏差變化率ec的論域?yàn)閧B,V,S,O,X,Z,D},參數(shù)的自整定原則如下所述。
當(dāng)系統(tǒng)偏差較大時(shí),選取較大的比例系數(shù)和較小的微分系數(shù),同時(shí)為了防止積分飽和,避免系統(tǒng)響應(yīng)出現(xiàn)較大超調(diào),積分環(huán)節(jié)取值為0。
當(dāng)偏差與偏差變化率為中等大小時(shí),3個(gè)參數(shù)都不能太大且積分環(huán)節(jié)取較小值,比例與微分環(huán)節(jié)的取值要適中,以保證系統(tǒng)的響應(yīng)速度。
當(dāng)系統(tǒng)偏差較小時(shí),為使控制系統(tǒng)具有良好的穩(wěn)態(tài)性能,應(yīng)將比例與積分環(huán)節(jié)系數(shù)提高,同時(shí)為了避免系統(tǒng)在設(shè)定值附近震蕩,并考慮系統(tǒng)的抗干擾性能,選取中等大小的微分系數(shù)。
綜上所述,想要將控制系統(tǒng)的各項(xiàng)性能發(fā)揮出色,使系統(tǒng)輸出穩(wěn)態(tài)精度高且響應(yīng)速度快,需要充分考慮比例、積分與微分3個(gè)參數(shù),才能保證系統(tǒng)的動(dòng)靜態(tài)性能。綜合考慮不同狀態(tài)下3個(gè)參數(shù)的作用以及之間的耦合關(guān)系,得出參數(shù)自適應(yīng)控制規(guī)則見表1。表1中從左到右分別是Kp,Ki,Kd的模糊控制規(guī)則。
表1 模糊PID控制規(guī)則
| e | ec | ||||||
| B | V | S | O | X | Z | D | |
| B | D/B/X | D/B/X | Z/V/B | X/V/B | X/S/B | O/O/N | O/O/X |
| V | D/B/X | D/B/S | Z/V/B | X/S/V | X/S/V | O/O/S | S/O/O |
| S | Z/B/O | Z/V/S | Z/V/S | X/S/O | O/O/S | S/X/S | V/X/O |
| O | Z/S/O | Z/S/S | X/S/S | O/O/S | S/X/V | V/Z/S | S/Z/O |
| X | X/V/O | X/S/O | O/O/O | O/X/S | S/X/O | V/Z/O | B/D/O |
| Z | X/O/D | O/O/S | S/X/S | V/X/N | V/Z/X | B/D/X | B/D/D |
| D | O/O/D | O/O/Z | S/X/V | V/X/V | B/Z/X | B/D/X | B/D/D |
對于建立好的模糊控制規(guī)則其所包含的所有規(guī)則都可以通過模糊數(shù)學(xué)基礎(chǔ)求出其模糊子矩陣,一個(gè)完整控制規(guī)則各部分子矩陣聯(lián)立求解又可以得到控制系統(tǒng)總的模糊矩陣。利用Matlab數(shù)學(xué)軟件中的Fuzzy Logic Toolbox可以離線生成模糊控制查詢表。
3 模糊PID控制器在PLC中的實(shí)現(xiàn)
模糊PID控制器在PLC中的實(shí)現(xiàn)方式主要有2種:一種通過控制公司為模糊控制開發(fā)的專用硬件設(shè)備實(shí)現(xiàn)在PLC中的運(yùn)行,這種控制通過模糊控制芯片實(shí)現(xiàn),但這種控制方式價(jià)格昂貴,需要專用的編程設(shè)備,通用性差;另一種是通過軟件實(shí)現(xiàn)的,如西門子公司開發(fā)的ProFuzzy tool,同樣該軟件成本昂貴,會(huì)增加設(shè)備成本。
文中采用通過PLC自身編程軟件STEP7軟件將模糊PID控制編程為一個(gè)PLC控制程序的一個(gè)用戶子程序,將模糊控制規(guī)則存進(jìn)PLC的內(nèi)存中。在實(shí)時(shí)控制中,該控制將采樣得到的輸入量數(shù)據(jù)量化到設(shè)定好的模糊論域中,在根據(jù)量化后得到的元素,查出控制量的具體值,最后輸出到控制系統(tǒng)。
3.1 程序設(shè)計(jì)流程
給袋式包裝機(jī)稱量系統(tǒng)模糊PID控制的PLC程序設(shè)計(jì)主要有輸入量的模糊化、模糊規(guī)則查詢、輸出模糊化和參數(shù)PID控制4分部,模糊控制算法流程見圖4。首先將量化因子存于PLC中,經(jīng)過采樣后將系統(tǒng)偏差以及偏差變化率寄存在PLC數(shù)據(jù)寄存器中;通過模糊控制規(guī)則表獲得其輸出參數(shù)數(shù)據(jù),寄存在PLC中;最后將控制參數(shù)輸入到PID控制中實(shí)現(xiàn)對參數(shù)的實(shí)時(shí)控制。
3.2 模糊PID控制的PLC程序設(shè)計(jì)
該次設(shè)計(jì)的控制系統(tǒng)采用西門子S7-200系列PLC外置模擬量輸入模塊EM235,將稱量傳感器得到的信號(hào)輸入PLC中,該模塊可以將傳感器所得信號(hào)轉(zhuǎn)換成(0~32000)之間的數(shù)字量。由此可將系統(tǒng)設(shè)計(jì)偏差轉(zhuǎn)換成(?32~32),為簡化編程將其取絕對值變?yōu)椋?~32)由此得到量化因子為3/16。按照圖5設(shè)計(jì)流程,設(shè)計(jì)該控制程序。
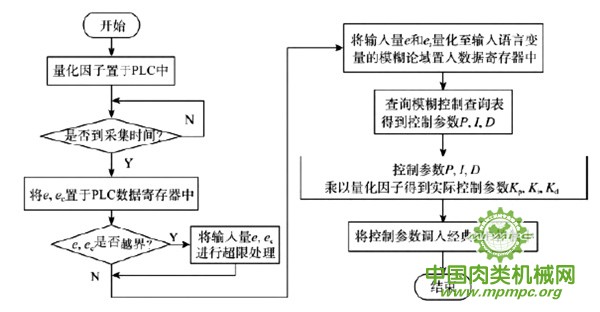
圖4 模糊控制算法流程
利用PLC存儲(chǔ)空間中的全局變量存儲(chǔ)器,將預(yù)置期望質(zhì)量放入VD104,分配Kp,Ki,Kd在全局變量存儲(chǔ)器中的地址,文中分別選用VB20~VB68,VB69~VB117,VB118~VB166作為上述3個(gè)參數(shù)的存儲(chǔ)地址。該3個(gè)參數(shù)的控制輸出量分別放入VB167,VB168和VB169中,根據(jù)系統(tǒng)控制要求3個(gè)參數(shù)最初數(shù)值為Kp=0.6,Ki=0.0,Kd=1.5,在PLC控制中可以直接調(diào)用PID控制,選擇PID控制回路號(hào)為0,起始地址選用VB100。由于篇幅所限僅以部分程序?yàn)槔?,模糊控制主程序見圖5,模糊查詢表控制程序見圖6。
模糊查詢表控制程序僅以比例環(huán)節(jié)為例,掃描程序時(shí),SM0.0始終為高電平,所取模糊量化等級為7級,據(jù)此計(jì)算出比例系數(shù)Kp的地址,放入累加器AC1中,將指針?biāo)窴p輸出值存入VB167中,以備后續(xù)程序調(diào)用。
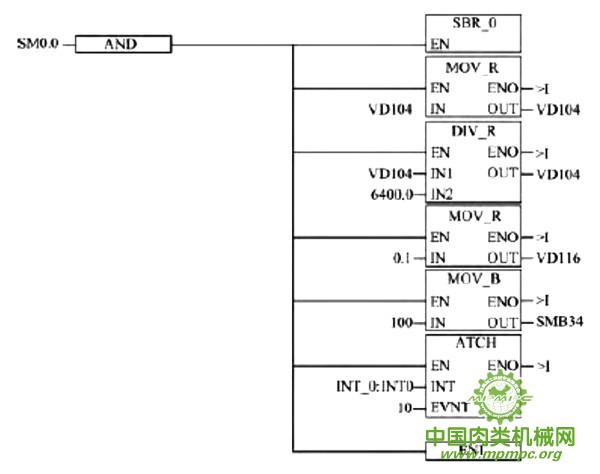
圖5 模糊控制主程序
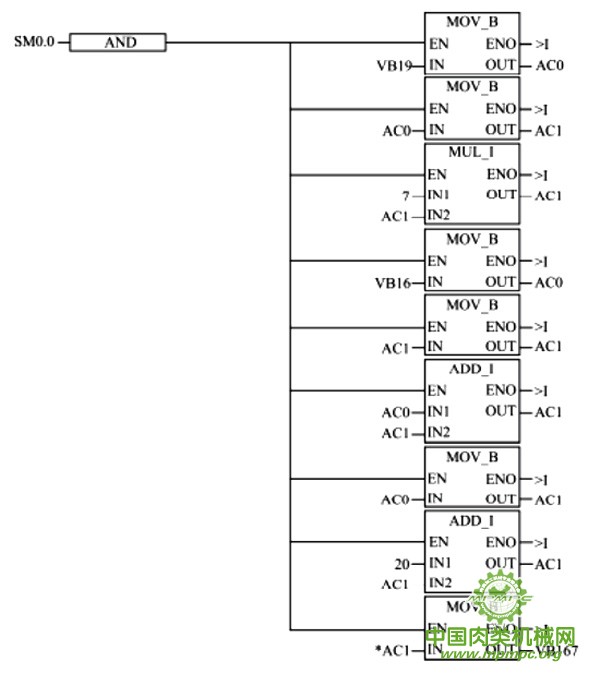
圖6 比例環(huán)節(jié)模糊控制查詢程序
4 包裝機(jī)實(shí)驗(yàn)
利用Matlab數(shù)學(xué)仿真軟件在軟件中輸入fuzzy進(jìn)行模糊控制器的編輯,確定一個(gè)二輸入三輸出的二維模糊控制器,編輯界面中的參數(shù)選擇FIS控制器類型為Mamdani,解模糊方法采用重心法,推理規(guī)則選擇最小法,合成規(guī)則選擇最大法。編輯輸入輸出變量的隸屬函數(shù)將上述控制規(guī)則輸入到控制器中,見圖7。
使用Matlab中提供的Simulink仿真模擬器進(jìn)行仿真實(shí)驗(yàn),對比傳統(tǒng)PID和模糊PID 控制的控制效果分別建立各自的仿真模型,見圖8。
Simulink仿真模擬器中二輸入三輸出模塊內(nèi)部模型見圖9,其為模糊控制核心模型。
經(jīng)過Matlab 仿真結(jié)果見圖10,其中虛線為實(shí)際響應(yīng)曲線,對比2種不同的控制方法可以看出傳統(tǒng)PID控制下的系統(tǒng)超調(diào)量在不斷上下變化,最后趨于穩(wěn)定,達(dá)到穩(wěn)態(tài)所需時(shí)間長,且參數(shù)不能改變;模糊自適應(yīng)PID控制下的系統(tǒng)超調(diào)量很小甚至沒有,響應(yīng)時(shí)間較傳統(tǒng)PID要快。
仿真完成后對包裝機(jī)稱量系統(tǒng)進(jìn)行運(yùn)行調(diào)試。以100g/袋為實(shí)驗(yàn)基礎(chǔ)進(jìn)行稱量精度的實(shí)驗(yàn)。100g時(shí)稱量數(shù)據(jù)情況見表2。目標(biāo)質(zhì)量所對應(yīng)偏差的分布折線見圖11。
經(jīng)過以上實(shí)驗(yàn)分析可以得知,包裝機(jī)稱量系統(tǒng)的精度在±0.5%范圍內(nèi)。給袋式包裝機(jī)生產(chǎn)線的運(yùn)行情況良好,改良的稱量系統(tǒng)工作穩(wěn)定、精度好,滿足包裝要求。
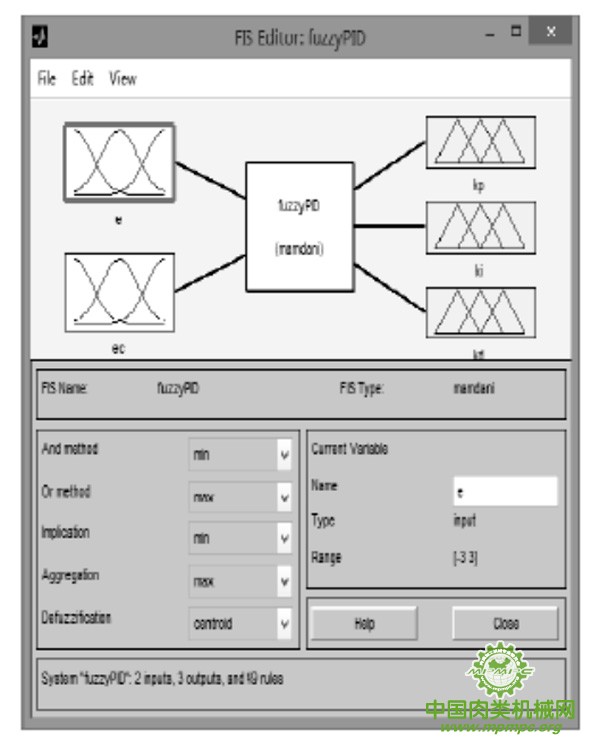
圖7 模糊控制編輯器
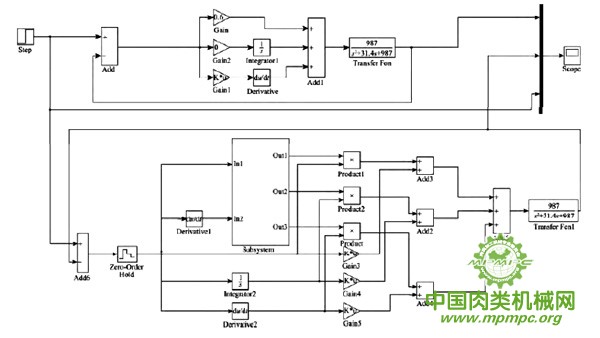
圖8 模糊PID控制仿真模型
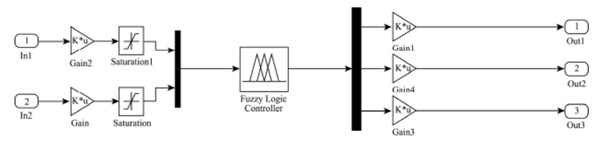
圖9 二輸入三輸出控制仿真模型
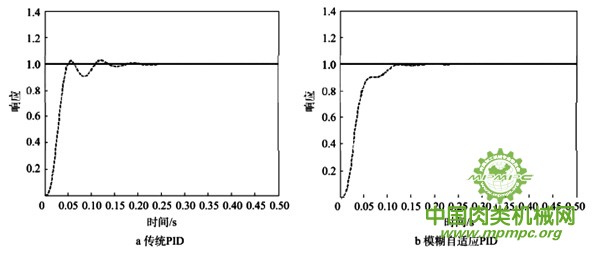
圖10 傳統(tǒng)PID與模糊自適應(yīng)PID系統(tǒng)響應(yīng)曲線
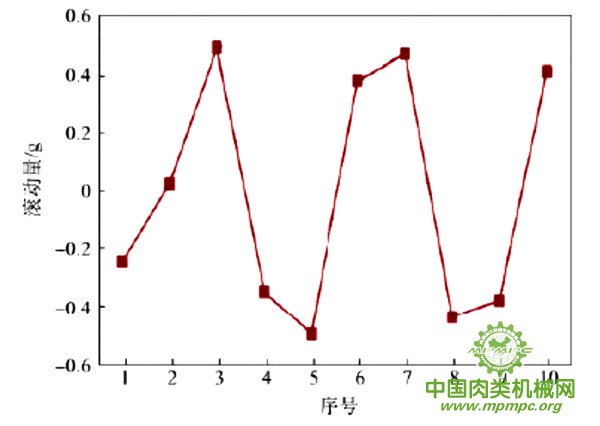
圖11 目標(biāo)質(zhì)量為100g時(shí)的偏差分布
表2 目標(biāo)質(zhì)量為100g時(shí)的實(shí)驗(yàn)數(shù)據(jù)
| 序號(hào) | 實(shí)際質(zhì)量/g | 偏差值/g | 精度/g |
| 01 | 100.25 | -0.25 | 0.25 |
| 02 | 099.98 | +0.02 | 0.02 |
| 03 | 100.49 | +0.49 | 0.49 |
| 04 | 099.65 | -0.35 | 0.35 |
| 05 | 099.50 | -0.50 | 0.50 |
| 06 | 100.38 | +0.38 | 0.38 |
| 07 | 100.47 | +0.47 | 0.47 |
| 08 | 099.56 | -0.44 | 0.44 |
| 09 | 099.62 | -0.38 | 0.38 |
| 10 | 100.41 | +0.41 | 0.41 |
5 結(jié)語
為了進(jìn)一步提高給袋式包裝機(jī)稱量系統(tǒng)精度,文中對其控制系統(tǒng)進(jìn)行研究分析,將模糊控制與PID控制相結(jié)合,提出基于傳統(tǒng)PID 的模糊控制。通過PLC強(qiáng)大的控制效果、編程能力實(shí)現(xiàn)模糊PID控制系統(tǒng)在包裝機(jī)稱量系統(tǒng)中的控制實(shí)現(xiàn)。實(shí)驗(yàn)結(jié)果表明,改進(jìn)后的控制系統(tǒng)具有較好的魯棒性,系統(tǒng)超調(diào)小,稱量精度控制在±0.5%左右,較好地滿足了包裝機(jī)精準(zhǔn)計(jì)量的要求。同時(shí)文中忽略了外界環(huán)境對控制對象的影響,控制規(guī)則是在前人實(shí)驗(yàn)的基礎(chǔ)上進(jìn)行的再次加工,故控制效果可能存在不足。

用")

